
ハウスローバーのブロック図です。

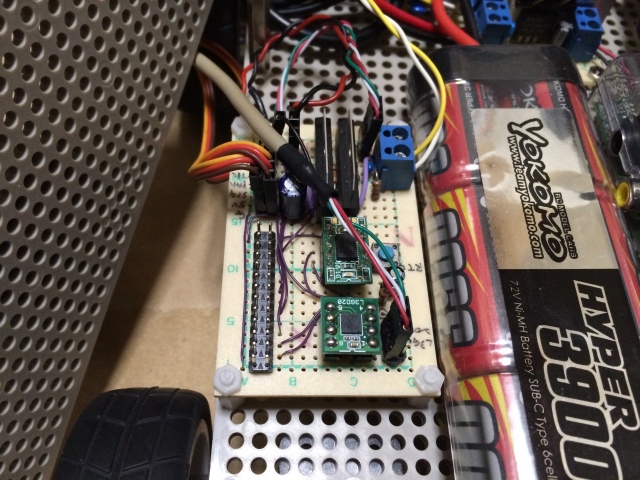
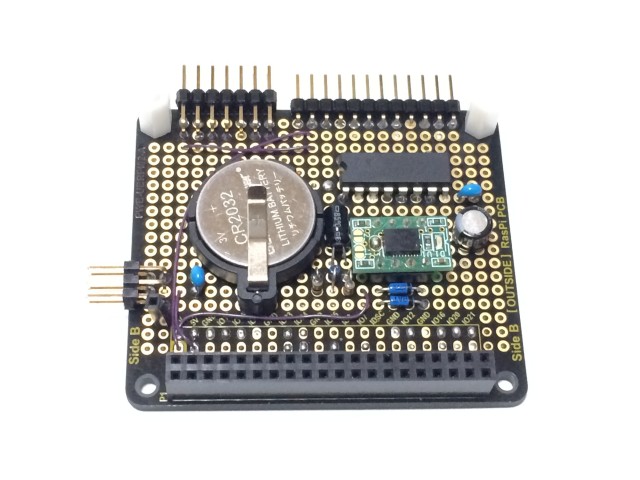
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC そしてサーボ用のコネクタなどを搭載しています。
Raspberry Piとの接続は26Pのフラットケーブルを使用しました。
また、電源レギュレータのみ電源基板として別にしました。電源構成はラジコン用バッテリー7.2Vからレギュレータを通し5Vをrasberry piへ供給しています。インターフェース基板へはrasberry piから5V、3.3Vを、また、モーター駆動用にバッテリーから7.2Vを供給しています。レギュレータは非常に高温となり、エネルギーを無駄に消費している気がしてならないので、DC-DCコンバーターを試してみたいと思っています。
回路図です。
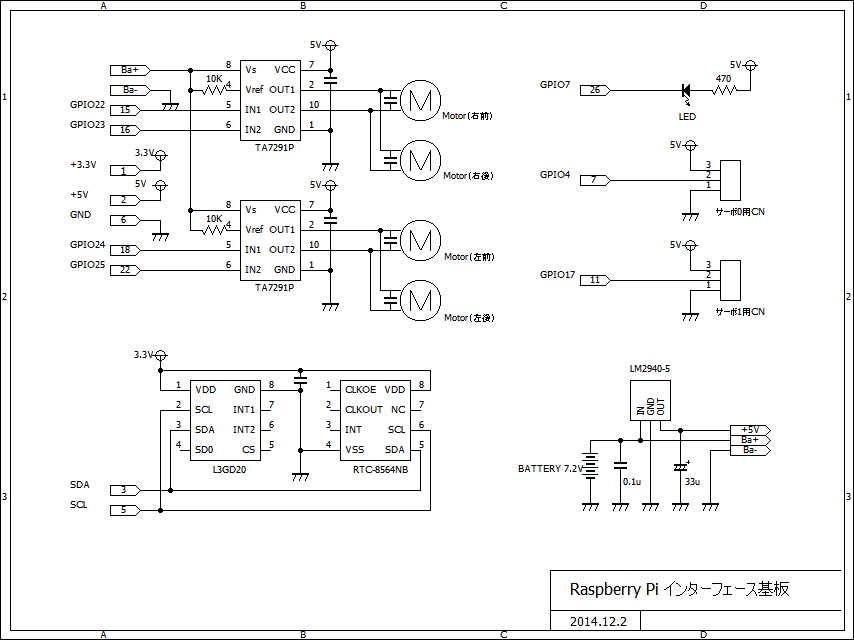
モータードライバーにはオーソドックスなTA7291Pを使用。モーター駆動の工作には、いつもこの素子を使っている気がします。息の長い部品です。
RTCは、システムのハードウェアクロックデバイスとして設定しています。 今後、バックアップバッテリーを接続し、アラーム出力を使ってRaspberry Piを起動させる機能を予定しています。
関連記事
 新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […]
新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […] ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]
ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […] ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]
ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […] View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […]
View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […] ロボット探査車の製作 気ままに製作中のロボット探査車。 作業中は記録に残すことを忘れてしまうので、以前の実験結果などが残っていません。 ドキュメントは、必要です […]
ロボット探査車の製作 気ままに製作中のロボット探査車。 作業中は記録に残すことを忘れてしまうので、以前の実験結果などが残っていません。 ドキュメントは、必要です […] Webカメラに超音波センサーを組み込む webカメラへパン・チルト機構を設けますが、超音波センサーや照明用LEDも同じ方向を向くような構成にしたいと思います。
購入前には計画し […]
Webカメラに超音波センサーを組み込む webカメラへパン・チルト機構を設けますが、超音波センサーや照明用LEDも同じ方向を向くような構成にしたいと思います。
購入前には計画し […]




