
加速度センサーによる距離の推定結果が思わしくなかったため、オーソドックスなフォトインタラプタ(フォトリフレクタ)を使用し、距離を測定することとしました。 使用したのは、TPR-105という反射型の素子です。 透過型の方が扱いが楽なのですが、スペースの問題により、この素子を選択しました。
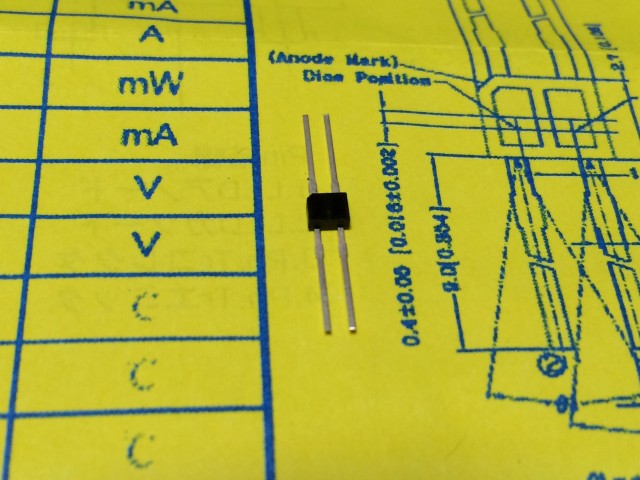
TPR-105
反射型の場合、対象との距離や反射率、外乱光などの影響を受け易いため、受光部の調整ができるようにすべきなのでしょうが、実験を繰り返し最適値を導きました。
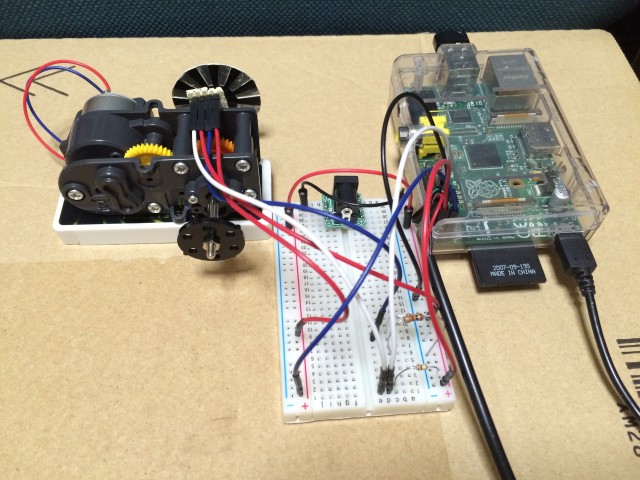
実験の様子
反射板のパターン作成にはVegaさんのロータリ・エンコーダ用パターン作成ソフトを利用させていただきました。 winXP用に作成されたソフトのようですが、win7でも問題なく動作しました。

回路は丸型ユニバーサル基板 (32mm)に作成し、モーターへ両面テープで取付ます。 センサーと反射板のギャップは2~3ミリです。 当初、発光部のダイオードは5Vを供給していましたが、黒パターンの認識が不安定であった為、3.3Vへ変更しました。 また、実機に搭載した際にモーターノイズの影響と思われる誤カウントが見られましたので、出力部分へコンデンサを追加しました。
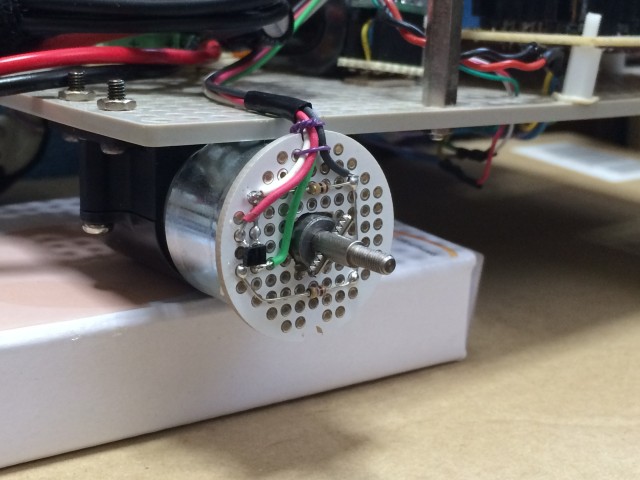
センサー基板
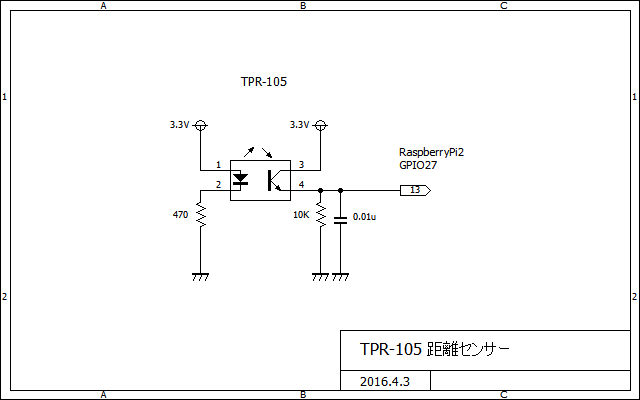
センサー基板 回路図
※2016.4.3 出力部の抵抗を10KΩへ変更しました。
ソフトウェアは一定時間毎にセンサー値を読み込み、その変化をカウントしていきます。 パルス幅を計測する速度測定などは、処理速度の面で無理がありますので、単純にカウントのみとしています。
//motor_enc1.c v1.0 201505016
#include <stdio.h>
#define MOTOR1 22 // GPIO22
#define MOTOR2 23 // GPIO23
#define MOTOR3 24 // GPIO24
#define MOTOR4 25 // GPIO25
#define LEFT_STR "l"
#define RIGHT_STR "r"
#define FWRD_STR "f"
#define BACK_STR "b"
int main(int argc, char **argv)
{
int inp,bak,enc=0,tout=0,i=0;
//引数の取得
int con = atoi(argv[2]);
// WiringPi イニシャライズ
if(wiringPiSetupGpio() == -1) return;
// モーター停止
digitalWrite(MOTOR1, 0);
digitalWrite(MOTOR2, 0);
digitalWrite(MOTOR3, 0);
digitalWrite(MOTOR4, 0);
if ( strcmp( argv[1], FWRD_STR ) == 0 ){
//前進
digitalWrite(MOTOR2, 1);
digitalWrite(MOTOR4, 1);
} else if ( strcmp( argv[1], BACK_STR ) == 0 ){
//後退
digitalWrite(MOTOR1, 1);
digitalWrite(MOTOR3, 1);
} else if ( strcmp( argv[1], LEFT_STR ) == 0 ){
//左ターン
digitalWrite(MOTOR1, 1);
digitalWrite(MOTOR4, 1);
} else if ( strcmp( argv[1], RIGHT_STR ) == 0 ){
//右ターン
digitalWrite(MOTOR2, 1);
digitalWrite(MOTOR3, 1);
}
usleep(10000); //10ms
bak = digitalRead(27); //センサー値をバックアップ
while(1){
inp = digitalRead(27); //センサー値を読み込み
if(inp != bak){ //センサー値が変化しているか
i++;
if(i >= 2){ //同一の判定結果が2回連続しているか
enc++; //カウントアップ
bak = inp; //センサー値をバックアップ
i = 0;
tout = 0;
}
}else{
i =0;
tout++; //タイムアウト値をカウント
}
//カウント数をチェックし、指定値に達していたら停止
if(enc >= con || tout > 100){
//ブレーキ
digitalWrite(MOTOR1, 1);
digitalWrite(MOTOR4, 1);
digitalWrite(MOTOR2, 1);
digitalWrite(MOTOR3, 1);
usleep(500000);
//停止
digitalWrite(MOTOR1, 0);
digitalWrite(MOTOR4, 0);
digitalWrite(MOTOR2, 0);
digitalWrite(MOTOR3, 0);
return;
}
usleep(1500); //1.5ms
}
return;
}
実行は、第1引数に方向を、第2引数にカウント値を指定します。
./motor_enc1 f 24 (24パルス 前進)
距離の測定誤差は、1メートルで1センチ程度でした。 停止直前に減速させるなどの処理を行うことにより、バッテリー容量などによる誤差を小さくできると思いますが、現在は行っていません。
今後、自動走行パターンを簡単にプログラムできるインターフェースを作成したいと思います。

工進(KOSHIN) 浄化促進剤オーレス20 PA-258 [20g×15包]
¥1,145 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
【2024最新強化版】PONLEE バーナー ガスバーナー トーチバーナー パワートーチ 逆さ使用可能 料理用 ガストーチ 900℃~1300℃ 火力調節 耐熱 炎と温度調整可能 電子点火 炙り調理 BBQ 料理 お菓子作り 炭火起こし 溶接 キャンプ アウトドア用品 火口径:22mm 小型 火炎放射器 (燃料別売り)
¥1,999 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
USB Type C ケーブル USB-A & USB-Cケーブル【3本セット1m/1m/2m】3.0A 急速充電タイプc ケーブル Sony Xperia XZ2 XZ3/ Samsung S22 S21 S20 S10 S9/ Asus Zenfone 2/Xiaomi/Nintendo Switch その他 Android 等 USB-C機器対応
¥798 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)

HiKOKI(ハイコーキ) フィルタ 5枚入 乾式専用 集じん機 RP18DA用 380954
只今、価格を取得しています。
(2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)