
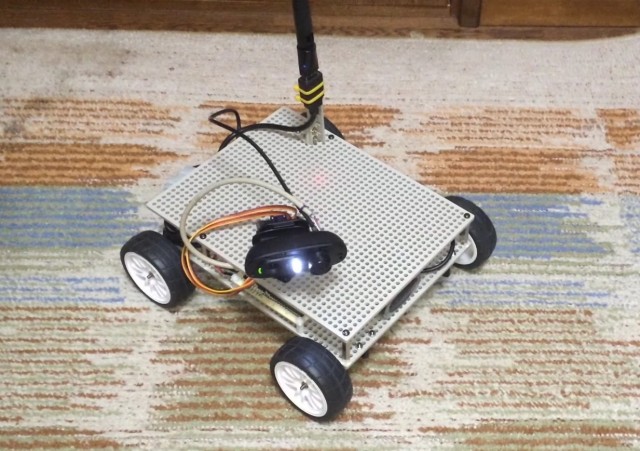
ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に(カンで)操縦することは容易ですが、信地旋回の際、進みたい方向に向けて停止させるのは至難の業です。
そこで開発(?)したのが View Direction Rotation Control System です。 日本語では、視点方向転回制御方式って感じでしょうか。
操作方法としては、
webカメラの中心を進みたい方向に向け、VRCSボタンを押すだけです。
内部では、webカメラの水平方向の位置を読み出し、その方向までジャイロセンサーを使って回転しています。
動画を公開しました。
この方法で、カメラ画像を頼りに行う遠隔操作が簡単になりました。
関連記事
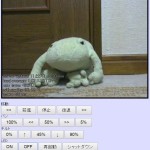 Webコントロールの画面構成 webコントロール画面は、MJPG-Streamerのストリーミング映像を中心に構成しています。
機能面では、Motionの方が充実して […]
Webコントロールの画面構成 webコントロール画面は、MJPG-Streamerのストリーミング映像を中心に構成しています。
機能面では、Motionの方が充実して […] ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]
ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […] ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]
ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]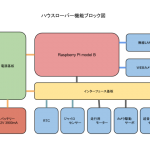 ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […]
ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […] Webコントロールをバージョンアップ 試作版のまま使用してきたコントロール用Webページですが、機能や表示すべき項目が決まってきましたので、この辺りできちんと(?)作りこんでみ […]
Webコントロールをバージョンアップ 試作版のまま使用してきたコントロール用Webページですが、機能や表示すべき項目が決まってきましたので、この辺りできちんと(?)作りこんでみ […] pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]
pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]

【2本セット】RAMPOW USB C ケーブル【1m+1m/黒 PD対応 60W急速充電】USB-C & USB-C ケーブル データ転送 断線防止 高耐久ナイロン iPhone15シリーズ充電ケーブル MacbookPro/iPad Pro&Air/Galaxy/SonyなどType C機種対応
¥999 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
【Amazon.co.jp限定】 バッファロー WiFi ルーター 無線 LAN Wi-Fi 6 11ax AX3000 2,401+573Mbps 日本メーカー 【 iPhone/iPhone SE(第二世代) / Nintendo Switch / PS5 メーカー動作確認済】 スマート 引っ越し エコパッケージ ブラック WSR-3000AX4P/NBK
¥9,980 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)

