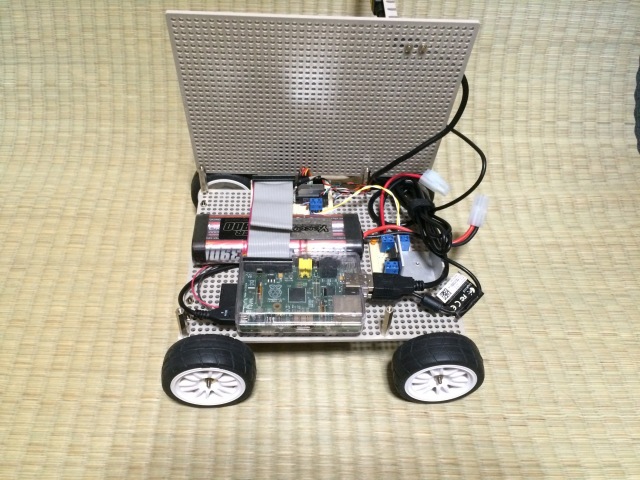
ハウスローバーのブロック図です。

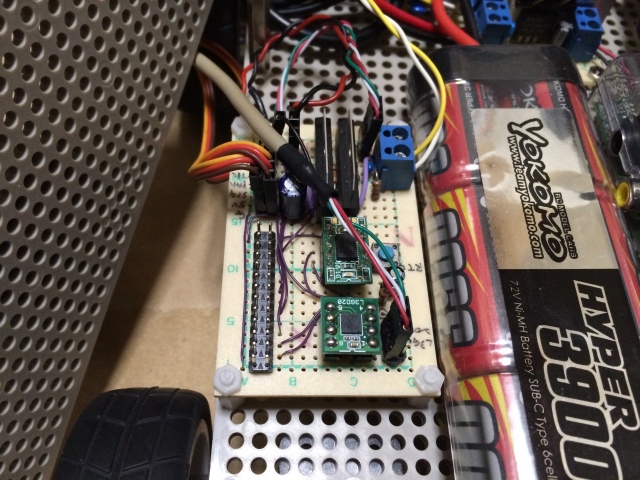
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC そしてサーボ用のコネクタなどを搭載しています。
Raspberry Piとの接続は26Pのフラットケーブルを使用しました。
また、電源レギュレータのみ電源基板として別にしました。電源構成はラジコン用バッテリー7.2Vからレギュレータを通し5Vをrasberry piへ供給しています。インターフェース基板へはrasberry piから5V、3.3Vを、また、モーター駆動用にバッテリーから7.2Vを供給しています。レギュレータは非常に高温となり、エネルギーを無駄に消費している気がしてならないので、DC-DCコンバーターを試してみたいと思っています。
回路図です。
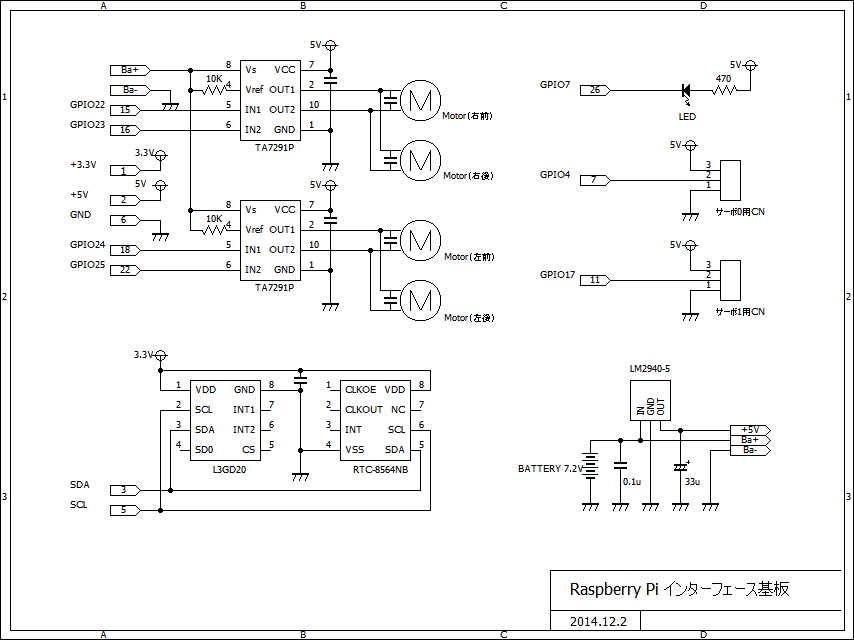
モータードライバーにはオーソドックスなTA7291Pを使用。モーター駆動の工作には、いつもこの素子を使っている気がします。息の長い部品です。
RTCは、システムのハードウェアクロックデバイスとして設定しています。 今後、バックアップバッテリーを接続し、アラーム出力を使ってRaspberry Piを起動させる機能を予定しています。

SK11 六角軸 鉄ドリル 適長 ノーマル 8.0mm
¥573 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
USB Type C ケーブル USB-A & USB-Cケーブル【3本セット1m/1m/2m】3.0A 急速充電タイプc ケーブル Sony Xperia XZ2 XZ3/ Samsung S22 S21 S20 S10 S9/ Asus Zenfone 2/Xiaomi/Nintendo Switch その他 Android 等 USB-C機器対応
¥798 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)