ESAの彗星探査機「フィラエ」が電力喪失、スリープモードに移行
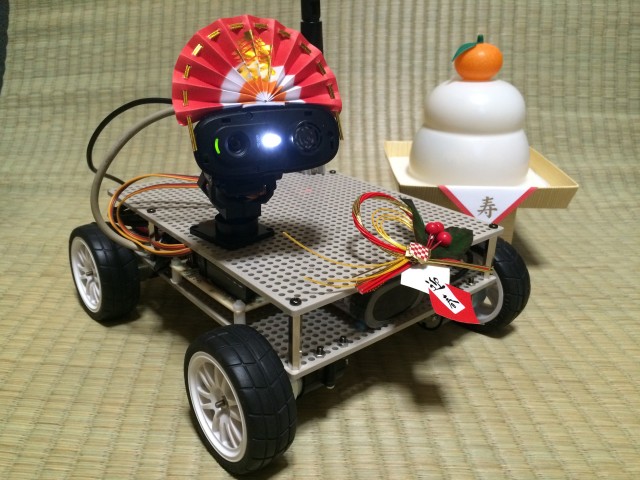
探査機にとって電力は命です。 フィラエは太陽光パネルに光が当たれば、復活の可能性がありますが、電力源としてバッテリーしか持たないハウスローバーは、それを消費してしまえば、活動できなくなります。 少しでも長くバッテリーを持続させるための制御に利用する計画で、RTCを搭載しました。

RTC-8564NBは、分、時、日、曜日を指定できるアラームと0~255秒(または分)を設定できるタイマーを内蔵しています。 その出力としてINT端子がLowレベルとなるため、Raspberry Piのリセット端子と接続することで、シャットダウン状態のシステムを起動することができます。
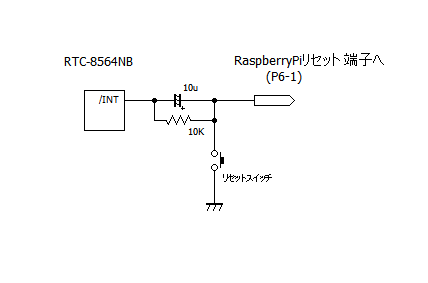
RTCのINT端子部分の配線

P6の1番ピンへ接続
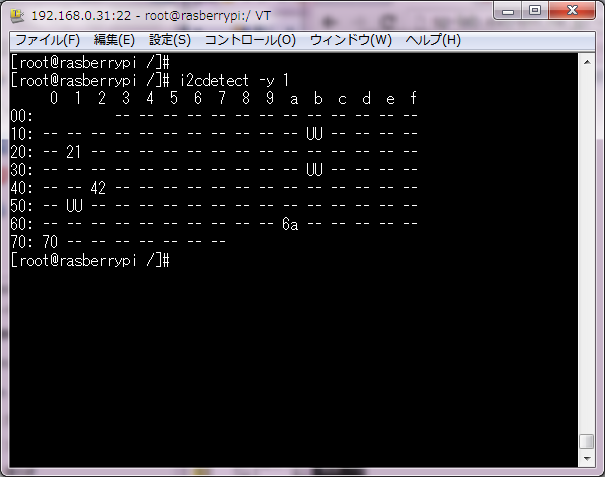
I2C接続後、ハードウェアクロックデバイスとして登録します。
/etc/modules-load.d/rasberrypi.conf へ
rtc-pcf8563 を、追加
echo pcf8563 0x51 > /sys/class/i2c-adapter/i2c-1/new_device を、実行する。
これで、hwclockコマンドが使用できるようになります。
ところが、システムモジュールとして登録すると、I2Cコマンドで直接操作ができなくなります。 (pythonでは可能なようですが…)
今回は、アラーム設定を直接操作したいので、システムモジュールには登録しません。 (システムモジュールとして登録されていて、一時的に外す場合は modprobe -r rtc-pcf8563 を実行)
PHPで、RTCを設定するスクリプトを作成しました。
<?php
//RTC SET v1.1 2015.1.11 spacelab
//ハードウェアクロックとして設定されている場合は
//タイムゾーンはUTCが使用されています。
//本スクリプトはJSTとして動作しますので、事前に
//時刻設定を行って下さい。
date_default_timezone_set('Asia/Tokyo');
setlocale(LC_ALL,"ja_JP.UTF-8");
$i2cadd = 0x51; //デバイススレーブアドレス
$msk3 = 0x07;
$msk5 = 0x1f;
$msk7 = 0x3f;
$msk8 = 0x7f;
$bit2 = 0x02;
if($argv[1]){ //パラメータチェック
$sw = $argv[1];
}else{
$sw = "-d";
}
switch ($sw){
case "-d":
//RTC時刻の取得
//レジスタの読み込み
$r_sec = hexdec(exec("i2cget -y 1 $i2cadd 0x02"));
$r_min = hexdec(exec("i2cget -y 1 $i2cadd 0x03"));
$r_hou = hexdec(exec("i2cget -y 1 $i2cadd 0x04"));
$r_day = hexdec(exec("i2cget -y 1 $i2cadd 0x05"));
//$r_wek = exec("i2cget -y 1 0x51 0x06");
$r_mon = hexdec(exec("i2cget -y 1 $i2cadd 0x07"));
$r_yea = substr(exec("i2cget -y 1 $i2cadd 0x08"),2) + 2000;
//不要ビットをマスク
$r_sec = dechex($r_sec & $msk8);
$r_min = dechex($r_min & $msk8);
$r_hou = dechex($r_hou & $msk7);
$r_day = dechex($r_day & $msk7);
$r_mon = dechex($r_mon & $msk5);
$timestamp = mktime($r_hou,$r_min,$r_sec,$r_mon,$r_day,$r_yea,0);
echo strftime("%c\n",$timestamp);
break;
case "-s":
//RTC時刻をシステムタイマーと同期
$r_yea = date('y');
$r_mon = date('m');
$r_day = date('d');
$r_wek = date('w');
$r_hou = date('H');
$r_min = date('i');
$r_sec = date('s');
exec("i2cset -y 1 $i2cadd 0x08 0x".$r_yea);
exec("i2cset -y 1 $i2cadd 0x07 0x".$r_mon);
exec("i2cset -y 1 $i2cadd 0x06 0x".$r_wek);
exec("i2cset -y 1 $i2cadd 0x05 0x".$r_day);
exec("i2cset -y 1 $i2cadd 0x04 0x".$r_hou);
exec("i2cset -y 1 $i2cadd 0x03 0x".$r_min);
exec("i2cset -y 1 $i2cadd 0x02 0x".$r_sec);
$timestamp = mktime($r_hou,$r_min,$r_sec,$r_mon,$r_day,$r_yea,0);
echo strftime("%c\n",$timestamp);
break;
case "-w":
//RTCをシステム時刻に設定
//レジスタの読み込み
$r_sec = hexdec(exec("i2cget -y 1 $i2cadd 0x02"));
$r_min = hexdec(exec("i2cget -y 1 $i2cadd 0x03"));
$r_hou = hexdec(exec("i2cget -y 1 $i2cadd 0x04"));
$r_day = hexdec(exec("i2cget -y 1 $i2cadd 0x05"));
//$r_wek = exec("i2cget -y 1 0x51 0x06");
$r_mon = hexdec(exec("i2cget -y 1 $i2cadd 0x07"));
$r_yea = substr(exec("i2cget -y 1 $i2cadd 0x08"),2) + 2000;
//不要ビットをマスク
$r_sec = dechex($r_sec & $msk8);
$r_min = dechex($r_min & $msk8);
$r_hou = dechex($r_hou & $msk7);
$r_day = dechex($r_day & $msk7);
$r_mon = dechex($r_mon & $msk5);
$timestr = "$r_yea/$r_mon/$r_day $r_hou:$r_min:$r_sec";
exec("date --set='".$timestr."'");
echo exec("date")."\n";
break;
case "-as":
//アラーム時刻の設定
if($argv[2]){
if($argv[2] =="m"){$a_cas = "0x09";}
if($argv[2] =="h"){$a_cas = "0x0a";}
if($argv[2] =="d"){$a_cas = "0x0b";}
if($argv[2] =="w"){$a_cas = "0x0c";}
if($argv[3]){
$a_val = hexdec($argv[3]);
}else{
$a_val = 128;
}
exec("i2cset -y 1 $i2cadd $a_cas $a_val");
exec("i2cset -y 1 $i2cadd 0x01 0x02");
}else{
//アラームセット
exec("i2cset -y 1 $i2cadd 0x01 0x02");
echo "アラームセットしました\n";
}
case "-a":
//アラーム時刻の表示
$a_set = hexdec(exec("i2cget -y 1 $i2cadd 0x01"));
$a_min = hexdec(exec("i2cget -y 1 $i2cadd 0x09"));
$a_hou = hexdec(exec("i2cget -y 1 $i2cadd 0x0a"));
$a_day = hexdec(exec("i2cget -y 1 $i2cadd 0x0b"));
$a_wek = hexdec(exec("i2cget -y 1 $i2cadd 0x0c"));
if ($a_min >=128){$a_min_on = "無効 ";}else{$a_min_on = "有効 ";}
if ($a_hou >=128){$a_hou_on = "無効 ";}else{$a_hou_on = "有効 ";}
if ($a_day >=128){$a_day_on = "無効 ";}else{$a_day_on = "有効 ";}
if ($a_wek >=128){$a_wek_on = "無効 ";}else{$a_wek_on = "有効 ";}
$a_min = dechex($a_min & $msk8);
$a_hou = dechex($a_hou & $msk7);
$a_day = dechex($a_day & $msk7);
$a_wek = dechex($a_wek & $msk3);
echo "アラーム設定";
if (dechex($a_set & $bit2) == 2){echo " 有効\n";}else{echo " 無効\n";}
echo "Minuite: $a_min_on $a_min\n";
echo "Hour : $a_hou_on $a_hou\n";
echo "Day : $a_day_on $a_day\n";
echo "Week : $a_wek_on $a_wek\n";
break;
case "-ar":
//アラームリセット
exec("i2cset -y 1 $i2cadd 0x01 0x00");
echo "アラームリセットしました\n";
break;
case "-ts":
//タイマーの設定
if($argv[2]){
exec("i2cset -y 1 $i2cadd 0x0f $argv[2]");
if($argv[3]){
exec("i2cset -y 1 $i2cadd 0x0e 0x83");
}else{
exec("i2cset -y 1 $i2cadd 0x0e 0x82");
}
exec("i2cset -y 1 $i2cadd 0x01 0x01");
}else{
echo "パラメータが足りません\n";
}
case "-t":
//タイマー情報の表示
$t_cnt = hexdec(exec("i2cget -y 1 $i2cadd 0x0e"));
$t_dat = hexdec(exec("i2cget -y 1 $i2cadd 0x0f"));
echo "タイマー設定";
if ($t_cnt >=128){echo " 有効\n";}else{echo " 無効\n";}
if ($t_cnt & 1){$clock = "分";}else{$clock = "秒";}
echo "Timer: $t_dat $clock\n";
break;
case "-tr":
//タイマーリセット
exec("i2cset -y 1 $i2cadd 0x01 0x00");
exec("i2cset -y 1 $i2cadd 0x0e 0x00");
echo "タイマーリセットしました\n";
break;
case "-h":
case "-?":
print <<< EOS
使用法: rtcset.php [機能] [設定値]...
機能:
-d 現在時刻を表示する
-s RTCをシステムクロックと同期する
-w RTCの時刻をシステムクロックへ設定する
-a アラームの設定状況を表示する
-as [m,h,d,w] [値]
アラームを有効に設定する
[m,h,d,w] 分,時,日,曜日の項目を指定する
[値] を省略すると該当項目を無効にする
曜日の値:日=0 月=1 火=2 水=3 木=4 金=5 土=6
例: 10時30分に設定
-as h 10
-as m 30
-ar アラームをリセットし、無効に設定する
-t タイマーの設定状況を表示する
-ts [値] [秒,分]
タイマーを有効に設定する
[値] 0-255(秒) 単位: [初期値=秒,1=分]
-tr タイマーをリセットし、無効に設定する
-h,-? 使い方を表示
-v バージョン情報を表示
EOS;
break;
case "-v":
echo "rtcset.php version 1.1\nCopyright (C) 2015 space laboratory\n";
break;
}
?>
php rtcset.php -h で、ヘルプが表示されます。 アラームやタイマーの設定をして、シャットダウンを実行することで、指定の時刻に起動させる事ができるようになりました。
アラーム出力はRaspberry Piにリセットをかけるものですので、メインのソフトウェアで定期的にタイマーを更新するような処理を行うことで、システム異常停止の際に復帰させる、ウォッチドッグタイマーの様な使い方もできると思います。

マウス Bluetooth 静音 【マルチ接続・2.4GHz&BLuetooth5.2】 ワイヤレスマウス マウス 無線 5ボタン 握りの極み エルゴノミクス マウス 節電モデル 【戻る/進むボタン搭載】 DPI3段階切替 USB 充電式 Windows mac Chrome pc wireless mouse (ブラック)
¥1,580 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
【Fire HD 10 第13世代用】Amazon純正 保護カバー (ブラック)
¥5,980 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
USB Type C ケーブル USB-A & USB-Cケーブル【3本セット1m/1m/2m】3.0A 急速充電タイプc ケーブル Sony Xperia XZ2 XZ3/ Samsung S22 S21 S20 S10 S9/ Asus Zenfone 2/Xiaomi/Nintendo Switch その他 Android 等 USB-C機器対応
¥798 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
【New】Fire HD 10 タブレット - 10インチHD ディスプレイ 32GB ブラック (2023年発売)
¥14,980 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)