
ロボットの移動量測定には、フォトインタラプタなどによる車輪の回転量計測や加速度センサー等によるものなどがありますが、非接触で移動量を検出する身近で安価なアレが使用できないかと思い立ち実験してみました。
これです。 ロジテック光学マウスMX510。 2、3年使い込んだ現役引退物ですので、結構古いです。
光学マウスはその性質上、マウスの底面から3ミリ程度までしか反応しないように設計されています。 そこで、センサー部に別のレンズを使用して反応距離を伸ばそうという試みです。
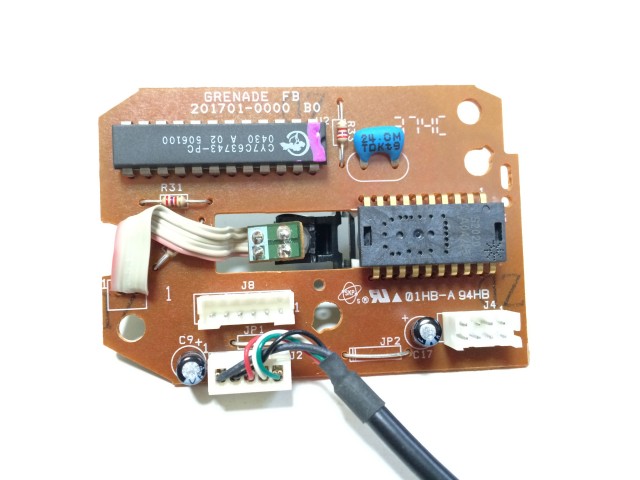

レンズと言っても適当なものがなく、古いデジカメから取り外しセンサー部に取り付け、位置や距離を試行錯誤。
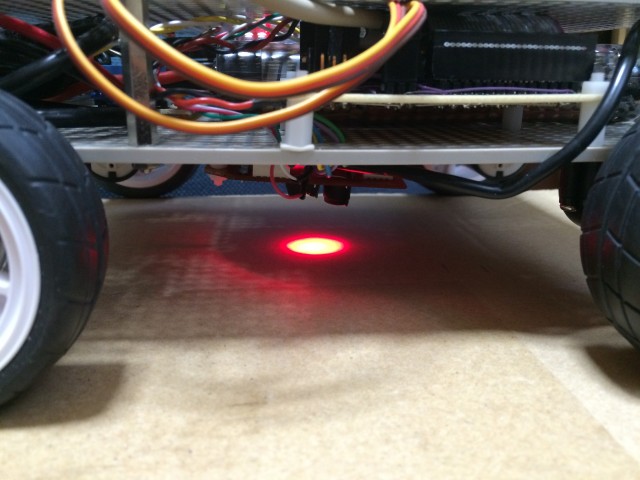
なんとか、レンズ面から30ミリの距離で床面の移動を検知出来る状態になりました。
実装するとすれば、こんな感じでしょうか。
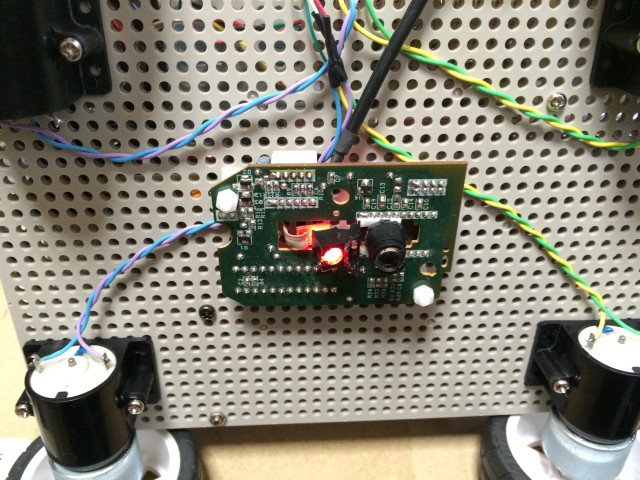
なんとか、使い物になりそうな感じですが、床面との距離には敏感で、焦点深度4ミリといったところでしょうか。 凹凸のある路面では厳しいかな…。
光源や光学系の性能次第ですね。
光学センサーを用いた移動ロボット用位置推定システムについて、東北大学の方が論文を書かれていました。
http://www.astro.mech.tohoku.ac.jp/~keiji/papers/pdf/2010-Robomec-IN-online.pdf
安価なセンサーだからといっても、移動ロボット用として信頼性を上げるのは簡単なことではなさそうです。
関連記事
 加速度センサーで距離を推定する ハウスローバーにとって、走行距離の計測は重要な項目です。 最も基本的な方法は、車輪の回転を検知することですが、車輪のスリップや障害物の影響 […]
加速度センサーで距離を推定する ハウスローバーにとって、走行距離の計測は重要な項目です。 最も基本的な方法は、車輪の回転を検知することですが、車輪のスリップや障害物の影響 […] HMC6352 ディジタルコンパスモジュールの実験 遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭 […]
HMC6352 ディジタルコンパスモジュールの実験 遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭 […] ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]
ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]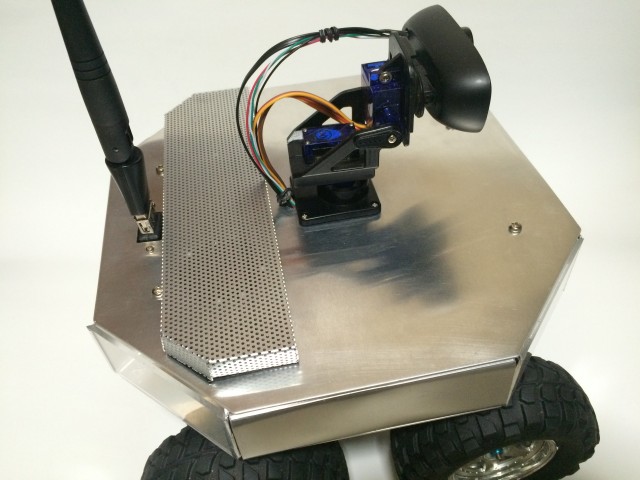 サウンド機能の追加とインターネットラジオの受信 アラートを発報するために赤色LEDを4ヶ所に配置し、回転発光、フラシュ発光ができるようになりました。 これにあわせ、サイレン音を発生させる […]
サウンド機能の追加とインターネットラジオの受信 アラートを発報するために赤色LEDを4ヶ所に配置し、回転発光、フラシュ発光ができるようになりました。 これにあわせ、サイレン音を発生させる […] 新型シャーシの製作 今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボ […]
新型シャーシの製作 今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボ […] フォトインタラプタで距離を測定する 加速度センサーによる距離の推定結果が思わしくなかったため、オーソドックスなフォトインタラプタ(フォトリフレクタ)を使用し、距離を測定するこ […]
フォトインタラプタで距離を測定する 加速度センサーによる距離の推定結果が思わしくなかったため、オーソドックスなフォトインタラプタ(フォトリフレクタ)を使用し、距離を測定するこ […]


Fire HD 8 Plus タブレット - 8インチHD ディスプレイ 32GB グレー (2022年発売)
¥12,980 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
【Fire HD 10 第13世代用】Amazon純正 保護カバー (ブルー)
¥5,980 (2024-02-26 11:45 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
